
最近遇到很多读者问西门子200smart PLC的运动控制如何做暂停功能?
本次小编将通过相对定位和绝对定位的两种方法讲解,由于相对定位会有累计误差。时间越长误差会越大,实际应用中相对定位暂停功能不实用,可以了解学习,实际应用中用绝对定位会更多,绝对定位会有误差,但是较小。
本次测试用到:
1.西门子200SMART ST20的PLC
2.雷赛步进电机和丝杆平台,如图1所示。

图1
注意:只有标准型晶体管输出的CPU才支持运动控制
1. 主程序
调用轴初始化指令和调用绝对定位、相对定位的子程序
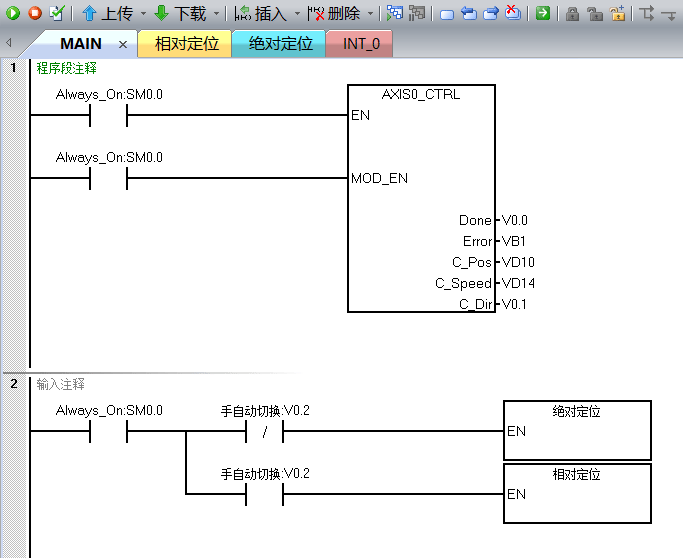
图2
2. 相对定位
相对定位的需要记录运行前的位置,暂停后把当前位置和运行前的位置进行运算,继续运行时把剩余距离赋值到GOTO指令中的设定位置,具体程序如图3―图7所示,程序有注释讲解,这里不做过多的介绍,有问题可以在评论留言。
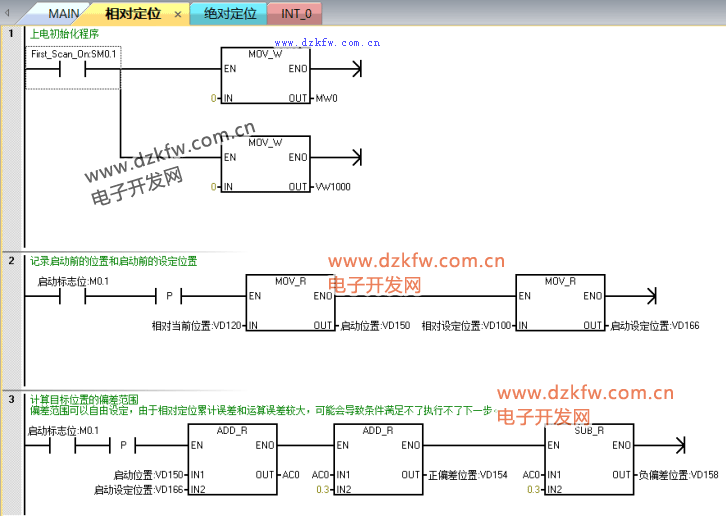
图3
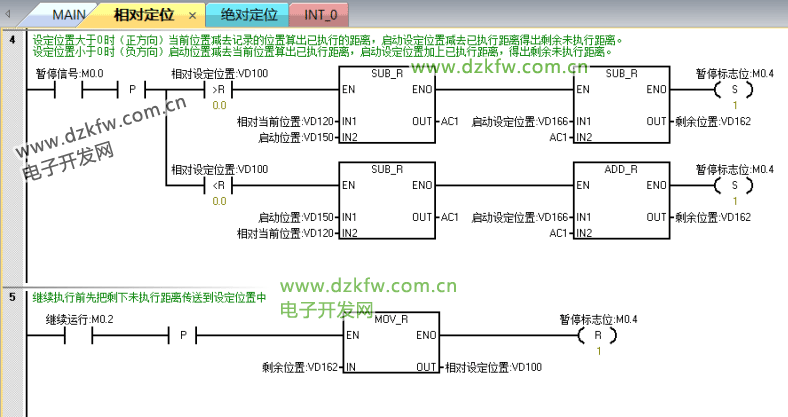
图4
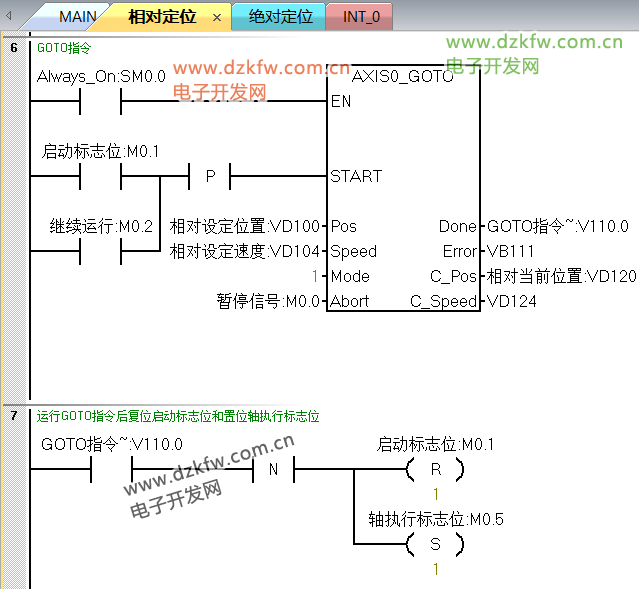
图5
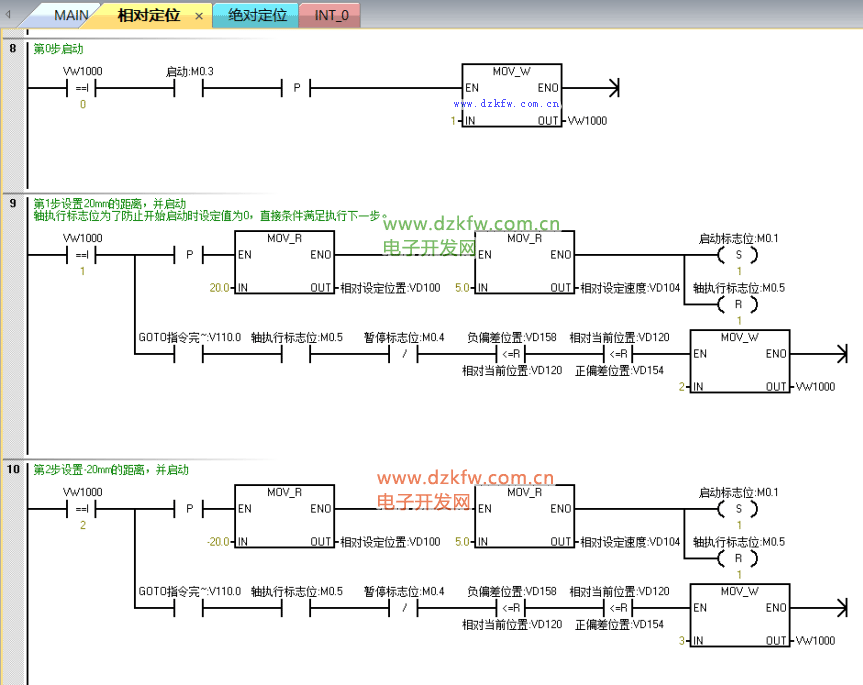
图6
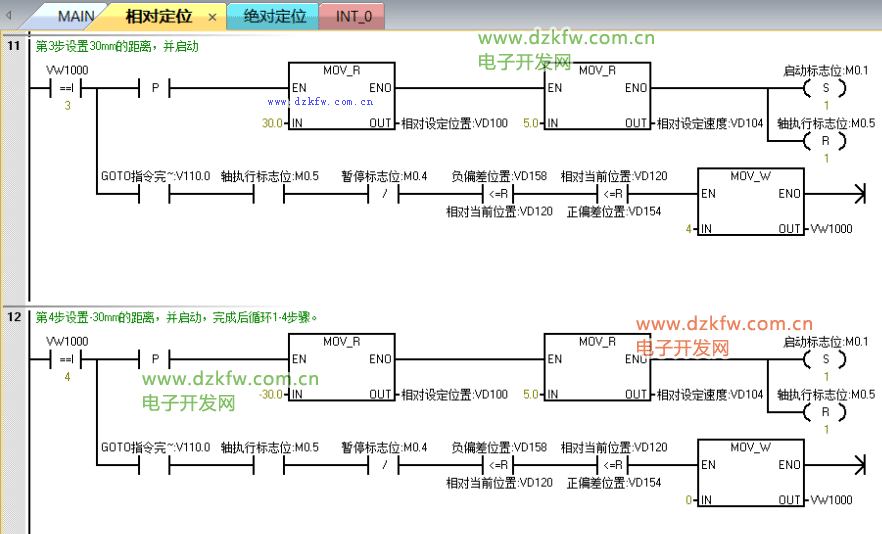
图7
3. 绝对定位
绝对定位的位置是唯一的,暂停后继续执行GOTO指令即可,不需要和相对定位那样记录位置,并且绝对定位误差较小,更适合应用于往复运动的定位控制,不容易产生太大的误差,具体程序如图8―图12所示,程序有注释讲解,这里不做过多的介绍,有问题可以在评论留言。
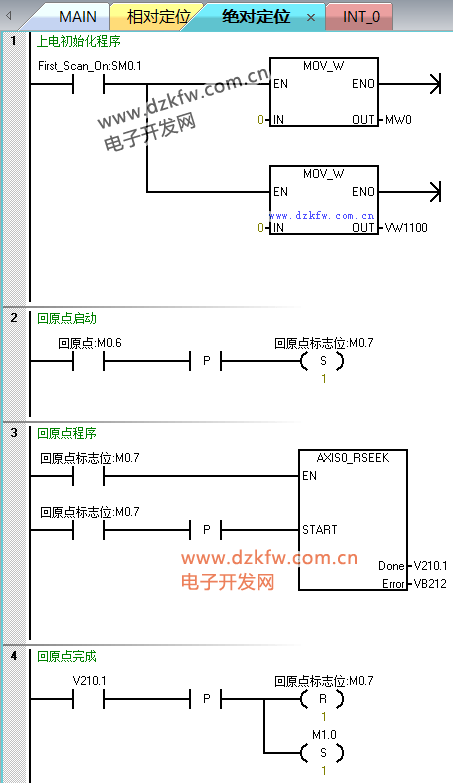
图8
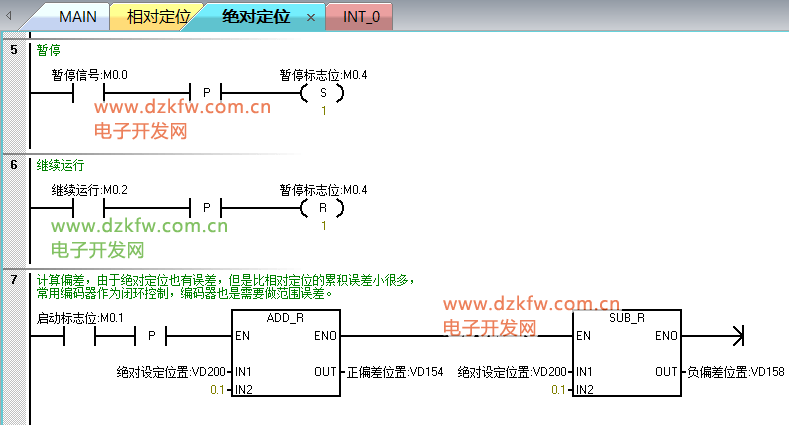
图9
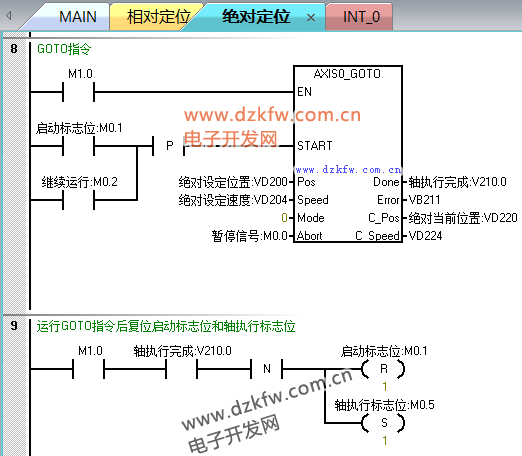
图10
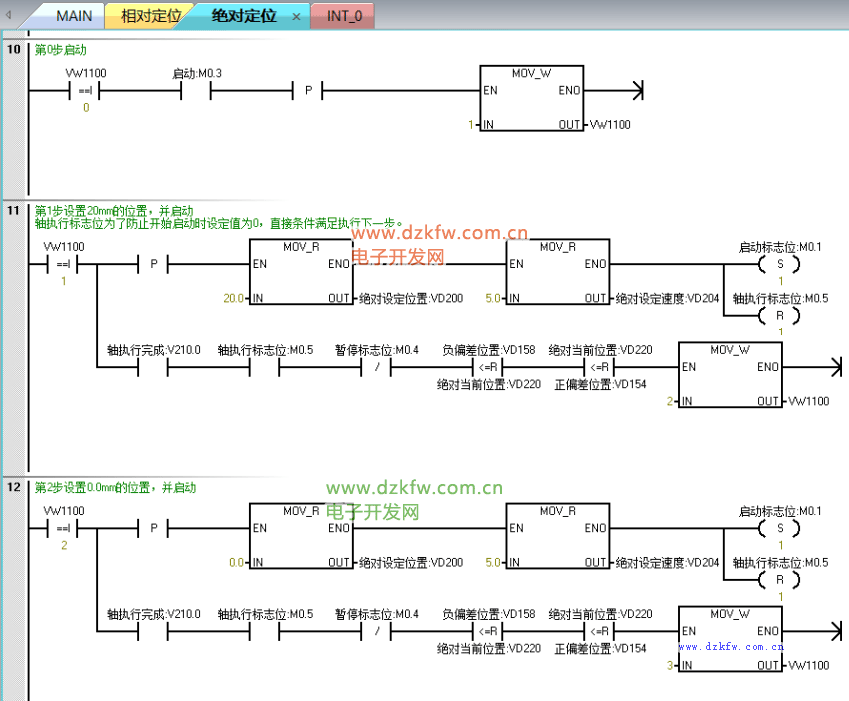
图11
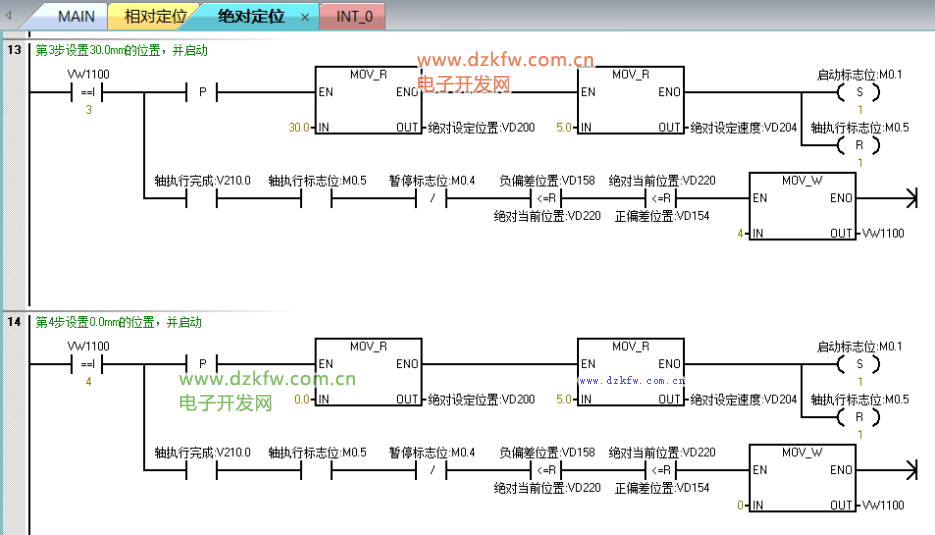
图12
以上就是整个西门子S7-200smart运动控制的暂停功能的方法,程序中没有做停止,需要停止的功能可以自己动手添加这个功能,文章内容如有错误请联系我们。
注意:此程序仅供学习参考用,应用于实际应用需要修改并测试。
附件:
200smart编程软件:
STEP 7-Micro/WIN SMART v2.5或者以上版本
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底