
步进电机的分类:
常用的步进电机按照相数可分为:二相、三相、四相、五相步进电机。
相数:是指步进电机内部的线圈组数,一般根据电机的导线或铭牌即可区分。
一个线圈引出两根导线,如果电机有四根线,即为二相步进电机。
电机相数不同,其步距角也不同,(无细分驱动时)一般两相步进电机步距角为1.8度、三相为1.2度、五相为0.72度。(有细分驱动时)相数将变得没有意义,只需在驱动器上改变细分数就可以改变步距角。
步进驱动器:
步进电机驱动器是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速和定位的目的。广泛应用于雕刻机、水晶研磨机、中型数控机床、脑电绣花机、包装机械、喷泉、点胶机、切料送料系统等分辨率较高的大、中型数控设备上。
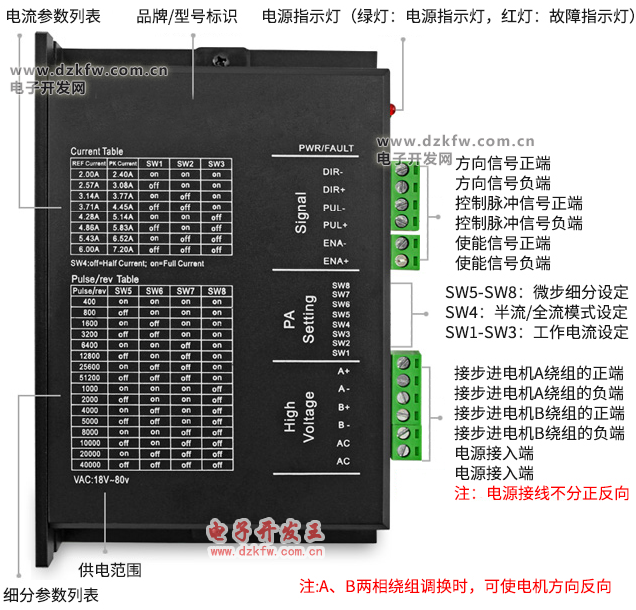
步进驱动器介绍:学习机箱内步进驱动器右侧波码开关说明
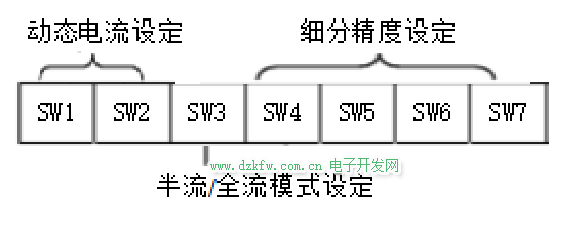
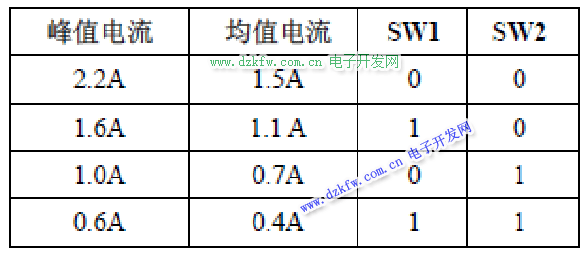
动态电流设定:能够允许的 最大电流,峰值电流.根据步进驱动器正面表格,设定电流和细分精度,其中SW3为半/全模式设定:此项设定若设定为ON,可理解为在无脉冲情况下驱动器输出电流自动降为额定输出电流以下大约70%,防止电机发热。
步进驱动器电流设定:a.电流设定
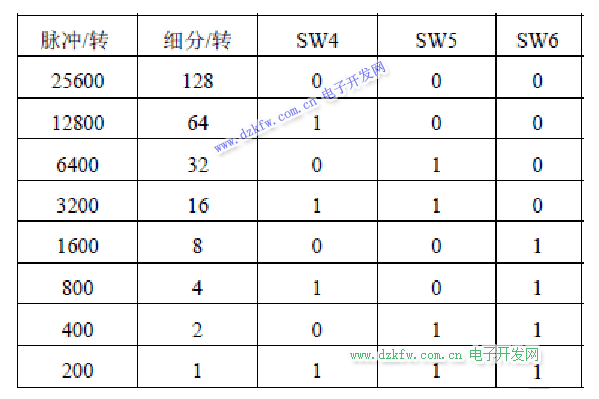
注意:细分越大,精度越高,速度越慢。
步进驱动器信号接口: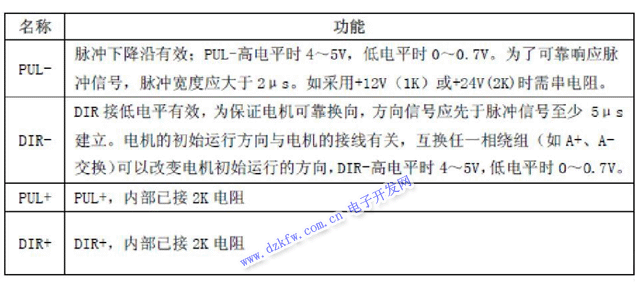
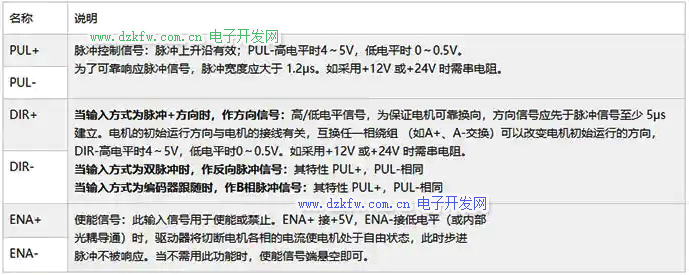
PLS+:步进脉冲信号输入正端或正向步进脉冲信号输入正端
PLS-:步进脉冲信号输入负端或正向步进脉冲信号输入负端
DIR+:步进方向信号输入正端或反向步进脉冲信号输入正端
DIR-:步进方向信号输入负端或反向步进脉冲信号输入负端
ENA+:脱机使能复位信号输入正端
ENA-:脱机使能复位信号输入负端
脱机使能信号有效时复位驱动器故障,禁止任何有效的脉冲,驱动器的输出功率元件被关闭,电机无保持扭矩。
步进驱动器控制信号连接:上位机的控制信号可以高电平有效,也可以低电平有效。当高有效时,把所有控制信号的负端连在一起作为信号地,低有效时,把所有控制信号的正端连在一起作为信号公共端。
注意:
信号端口供电电压VCC值为5V时,R短接;
现有的电源VCC值为12V时,R为1K,大于1/8W电阻;
VCC值为24V时,R为2K,大于1/8W电阻;
R必须接在控制器信号端
NPN连接: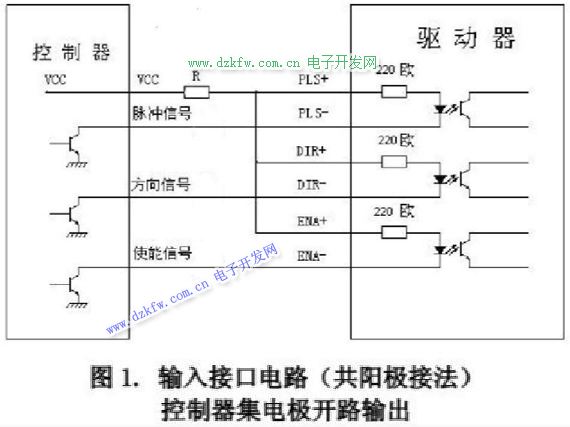
测量电机线圈为一组的方法:
短接法:把导线两两一组短接,有阻碍或拧不动即为一组
测量法:测量两导线之间的电阻值,每组线圈的电阻值相等
步进驱动器状态指示:当驱动器通电正常工作时,绿色LED 指示灯亮;故障指示红色LED 灯,当出现故障时,该指示灯以1 秒钟为周期循环闪烁;当故障被用户清除时,红色LED 灭。红色LED 在1 秒钟内闪烁次数代表不同的故障息,具体关系如下表所示: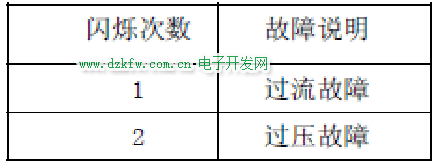

解决方法
a、如步进电机正好工作在共振区,可通过改变减速比提高步进电机运行速度.
b、采用带有细分功能的驱动器,这是最常用的,最简便的方法.因为细分型驱动器电机的相电流变化较半步型平缓.
c、换成步距角更小的步进电机,如三相或五相步进电机,或两相细分型步进电机.
d、换成直流或交流伺服电机,几乎可以完全克服震动和噪声,但成本较高.
e、在电机轴上加磁性阻尼器,市场上已有这种产品,但机械结构改变较大.
步进驱动器接线图说明:步进驱动器怎么接线?(图文详解)
很多人对步进驱动器接线可能有些不清楚,德科智控小编下面将从步进电机驱动器原理,步进电机工作原理方面来详细说明驱动器接线图。
步进电机是一种将电脉冲转化为角位移的执行机构。当步进电机驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(即步进角)。您可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
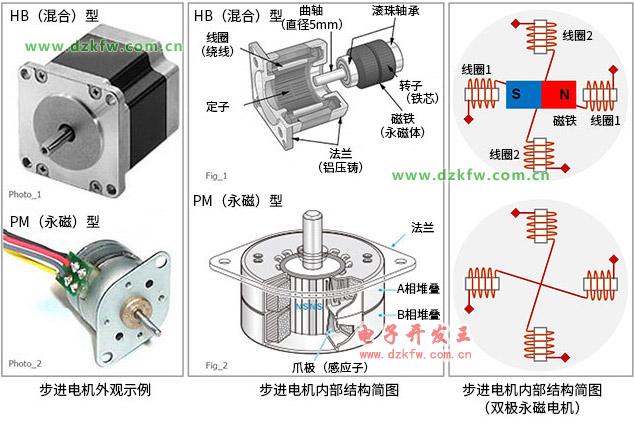
步进电机的原理:
步进电机是一种感应电机,它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,步进电机驱动器就是为步进电机分时供电的,多相时序控制器。
虽然步进电机已被广泛地应用,但步进电机并不能像普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
步进驱动器接口功能说明
1、控制信号接口
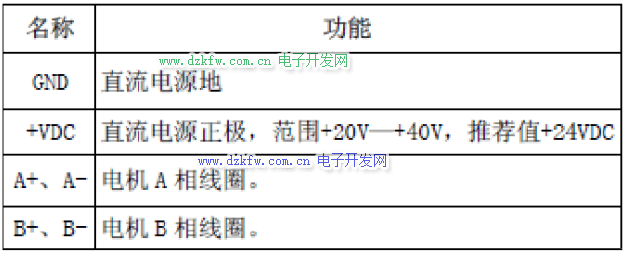
2、功率端口

3、状态指示
绿色 LED 为电源指示灯,当驱动器接通电源时,该 LED 常亮;当驱动器切断电源时,该LED 熄灭。红色 LED 为故障指示灯,当出现故障时,该指示灯根据故障类型,以0.2秒循环闪烁设定的次数.然后以1秒间隔继续重复以0.2秒循环闪烁设定的次数。直到故障被用户清除,红色 LED常灭。
故障类型对应的闪烁次数如下表:

控制信号接线
1. 控制信号采用单端接线方式时,接线图如下图所示:
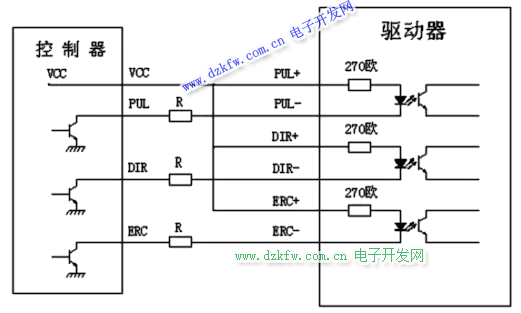
注意:VCC为5V时,R短路;
VCC为12V时,R为1K,大于0.125W电阻;
VCC为24V时,R为2K,大于0.125W电阻;
电阻必须接在控制信号端。
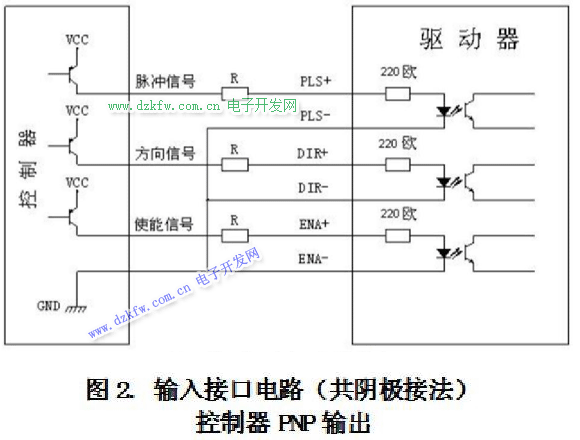
2.控制信号采用差分接线方式时,接线图如下图所示:
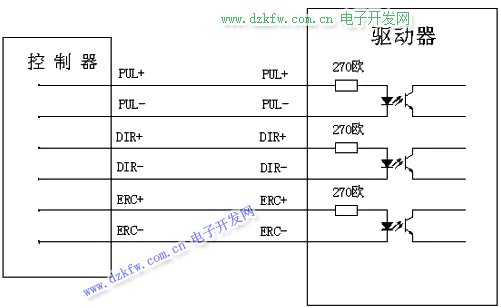
差分接线方式(控制器差分输出)
控制信号时序图
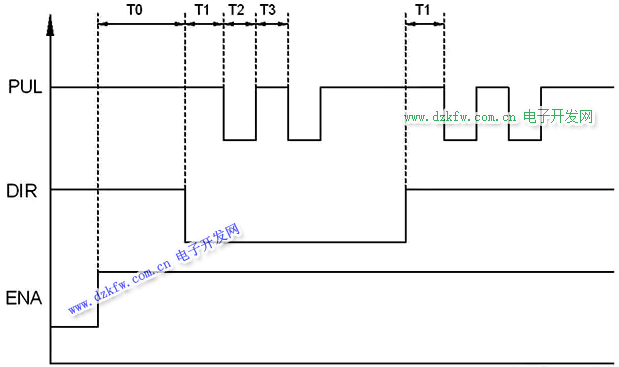
注释
1)T0: ENA(使能信号)应提前 DIR 至少 5mS,确定为高。通常ENA+和 ENA-悬空。
2)T1:DIR 至少提前PUL 下降沿 3μs。
3)T2:脉冲宽度至少不小于 1.0μs。
4)T3:低电平宽度不小于于 1.0μs。
3、步进电机驱动器接线要求
1)为了防止驱动器受干扰,建议控制信号采用屏蔽电缆线,并且屏蔽层与地线短接,除特殊要求外,控制信号电缆的屏蔽线单端接地:屏蔽线的上位机一端接地,屏蔽线的驱动器一端悬空。同一机器内只允许在同一点接地,如果不是真实接地线,可能干扰严重,此时屏蔽层不接。
2)脉冲和方向信号线与电机线不允许并排包扎在一起,最好分开至少 10cm 以上,否则电机噪声容易干扰脉冲方向信号引起电机定位不准,系统不稳定等故障。
3)如果一个电源供多台驱动器,应在电源处采取并联连接,不允许先到一台再到另一台链状式连接。
4)严禁带电拔插驱动器强电端子,带电的电机停止时仍有大电流流过线圈,拔插端子将导致巨大的瞬间感生电动势将烧坏驱动器。
5)严禁将导线头加锡后接入接线端子,否则可能因接触电阻变大而过热损坏端子。
6)接线线头不能裸露在端子外,以防意外短路而损坏驱动器。
步进电机的主要参数与技术指标
额定电压、额定电流、相数、步距角;步距角误差、最大静转矩、空载起动频率、最高运行频率等。
1、 相数:是指电机内部的线圈组数,目前常用的有两相、三相、五相步进电机。
2、 拍数:完成一个磁场周期性变化缩需脉冲数或导电状态,用m表示,或指电机转过一个齿距角所需脉冲数。
3、保持转矩:是指步进电机通电但没有转动时,定子锁住转子的力矩。 (注:通常步进电机在低速时的力矩接近保持转矩。人们常说的2N*M的步进电机,在没有特殊说明的情况下是指保持转矩为2N*M的步进电机)
4、 定位转矩:电机在不通电状态下,电机转子自身的锁定力矩。
5、 步距角:对应一个脉冲信号,电机转子转过的角位移。
6、 失步:电机运转时运转的步数,不等与理论上的步数。
7、 失调角:转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决的。
8、 运行矩频特性:电机在某种测试条件下测得运行中输出力矩与频率关系的曲线。
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底