
(1) SD卡的引脚定义:
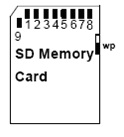
SD卡引脚功能详述:
|
引脚
编号 |
SD模式 |
SPI模式 | ||||
|
名称 |
类型 |
描述 |
名称 |
类型 |
描述 | |
|
1 |
CD/DAT3 |
IO或PP |
卡检测/
数据线3 |
#CS |
I |
片选 |
|
2 |
CMD |
PP |
命令/
回应 |
DI |
I |
数据输入 |
|
3 |
VSS1 |
S |
电源地 |
VSS |
S |
电源地 |
|
4 |
VDD |
S |
电源 |
VDD |
S |
电源 |
|
5 |
CLK |
I |
时钟 |
SCLK |
I |
时钟 |
|
6 |
VSS2 |
S |
电源地 |
VSS2 |
S |
电源地 |
|
7 |
DAT0 |
IO或PP |
数据线0 |
DO |
O或PP |
数据输出 |
|
8 |
DAT1 |
IO或PP |
数据线1 |
RSV |
|
|
|
9 |
DAT2 |
IO或PP |
数据线2 |
RSV |
|
|
注:S:电源供给 I:输入 O:采用推拉驱动的输出
PP:采用推拉驱动的输入输出
SD卡SPI模式下与单片机的连接图:
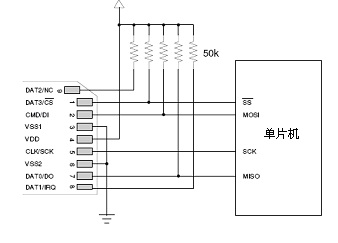
SD卡支持两种总线方式:SD方式与SPI方式。其中SD方式采用6线制,使用CLK、CMD、DAT0~DAT3进行数据通信。而SPI方式采用4线制,使用CS、CLK、DataIn、DataOut进行数据通信。SD方式时的数据传输速度与SPI方式要快,采用单片机对SD卡进行读写时一般都采用SPI模式。采用不同的初始化方式可以使SD卡工作于SD方式或SPI方式。这里只对其SPI方式进行介绍。
(2) SPI方式驱动SD卡的方法
SD卡的SPI通信接口使其可以通过SPI通道进行数据读写。从应用的角度来看,采用SPI接口的好处在于,很多单片机内部自带SPI控制器,不光给开发上带来方便,同时也见降低了开发成本。然而,它也有不好的地方,如失去了SD卡的性能优势,要解决这一问题,就要用SD方式,因为它提供更大的总线数据带宽。SPI接口的选用是在上电初始时向其写入第一个命令时进行的。以下介绍SD卡的驱动方法,只实现简单的扇区读写。
1) 命令与数据传输
1. 命令传输
SD卡自身有完备的命令系统,以实现各项操作。命令格式如下: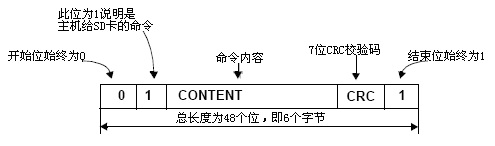
命令的传输过程采用发送应答机制,过程如下: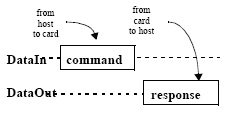
每一个命令都有自己命令应答格式。在SPI模式中定义了三种应答格式,如下表所示:
|
字节 |
位 |
含义 |
|
1 |
7 |
开始位,始终为0 |
|
6 |
参数错误 | |
|
5 |
地址错误 | |
|
4 |
擦除序列错误 | |
|
3 |
CRC错误 | |
|
2 |
非法命令 | |
|
1 |
擦除复位 | |
|
0 |
闲置状态 |
|
字节 |
位 |
含义 |
|
1 |
7 |
开始位,始终为0 |
|
6 |
参数错误 | |
|
5 |
地址错误 | |
|
4 |
擦除序列错误 | |
|
3 |
CRC错误 | |
|
2 |
非法命令 | |
|
1 |
擦除复位 | |
|
0 |
闲置状态 | |
|
2 |
7 |
溢出,CSD覆盖 |
|
6 |
擦除参数 | |
|
5 |
写保护非法 | |
|
4 |
卡ECC失败 | |
|
3 |
卡控制器错误 | |
|
2 |
未知错误 | |
|
1 |
写保护擦除跳过,锁/解锁失败 | |
|
0 |
锁卡 |
|
字节 |
位 |
含义 |
|
1 |
7 |
开始位,始终为0 |
|
6 |
参数错误 | |
|
5 |
地址错误 | |
|
4 |
擦除序列错误 | |
|
3 |
CRC错误 | |
|
2 |
非法命令 | |
|
1 |
擦除复位 | |
|
0 |
闲置状态 | |
|
2~5 |
全部 |
操作条件寄存器,高位在前 |
写命令的例程:
//-----------------------------------------------------------------------------------------------
向SD卡中写入命令,并返回回应的第二个字节
//-----------------------------------------------------------------------------------------------
unsigned char Write_Command_SD(unsigned char *CMD)
{
unsigned char tmp;
unsigned char retry=0;
unsigned char i;
//禁止SD卡片选
SPI_CS=1;
//发送8个时钟信号
Write_Byte_SD(0xFF);
//使能SD卡片选
SPI_CS=0;
//向SD卡发送6字节命令
for (i=0;i<0x06;i++)
{
Write_Byte_SD(*CMD++);
}
//获得16位的回应
Read_Byte_SD(); //read the first byte,ignore it.
do
{ //读取后8位
tmp = Read_Byte_SD();
retry++;
}
while((tmp==0xff)&&(retry<100));
return(tmp);
}
2) 初始化
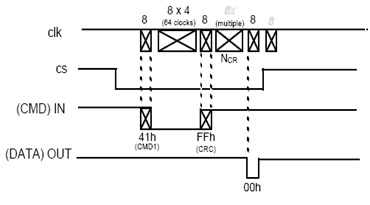
SD卡的初始化是非常重要的,只有进行了正确的初始化,才能进行后面的各项操作。在初始化过程中,SPI的时钟不能太快,否则会造初始化失败。在初始化成功后,应尽量提高SPI的速率。在刚开始要先发送至少74个时钟信号,这是必须的。在很多读者的实验中,很多是因为疏忽了这一点,而使初始化不成功。随后就是写入两个命令CMD0与CMD1,使SD卡进入SPI模式
初始化时序图: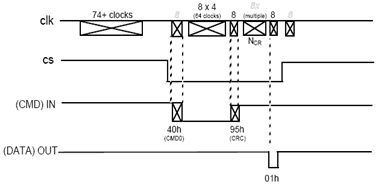
初始化例程:
//--------------------------------------------------------------------------
初始化SD卡到SPI模式
//--------------------------------------------------------------------------
unsigned char SD_Init()
{
unsigned char retry,temp;
unsigned char i;
unsigned char CMD[] = {0x40,0x00,0x00,0x00,0x00,0x95};
SD_Port_Init(); //初始化驱动端口
Init_Flag=1; //将初始化标志置1
for (i=0;i<0x0f;i++)
{
Write_Byte_SD(0xff); //发送至少74个时钟信号
}
//向SD卡发送CMD0
retry=0;
do
{ //为了能够成功写入CMD0,在这里写200次
temp=Write_Command_SD(CMD);
retry++;
if(retry==200)
{ //超过200次
return(INIT_CMD0_ERROR);//CMD0 Error!
}
}
while(temp!=1); //回应01h,停止写入
//发送CMD1到SD卡
CMD[0] = 0x41; //CMD1
CMD[5] = 0xFF;
retry=0;
do
{ //为了能成功写入CMD1,写100次
temp=Write_Command_SD(CMD);
retry++;
if(retry==100)
{ //超过100次
return(INIT_CMD1_ERROR);//CMD1 Error!
}
}
while(temp!=0);//回应00h停止写入
Init_Flag=0; //初始化完毕,初始化标志清零
SPI_CS=1; //片选无效
return(0); //初始化成功
}
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底