
【实例 14 】四台电动机顺序定时启动,同时停止
1.PLC 控制任务说明 用按钮控制四台电动机:按下启动按钮,先启动第一台电动机后,每隔 5s 启动一台电动机,直至第四台电动机启动完毕;按下停止按钮,四台电动机同时停止运转。
2. 电气接线
表 3-3 为输入 / 输出元件及其控制功能。
图 3-8 为四台电动机顺序定时启动、同时停止的电气接线。
图 中,停止按钮SB2 采用常开触点。
表 3-3 输入 / 输出元件及其控制功能
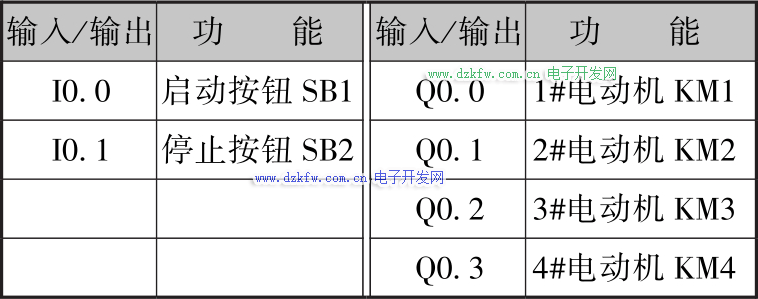
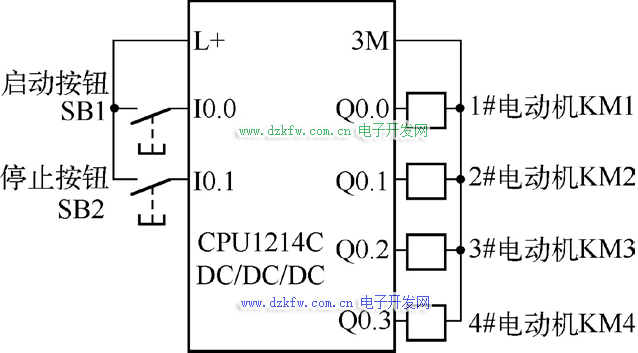
图 3-8 四台电动机顺序定时启动、同时停止的电气接线
3.PLC 编程
图 3-9 为四台电动机顺序定时启动、同时停止的时序图,即按下启动按钮, Q0.0 先置位,第一台电动机启动,同时定时器1 开始计时, 5s 后, Q0.1 置位,第二台电动机启动,依次 5s 后,第三台电动机启动,第四台电动机启动;按下停止按钮后,所有的电动机都复位,停止运转。
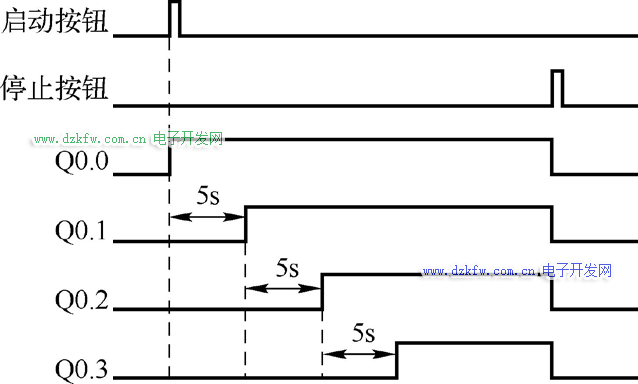
图 3-9 四台电动机顺序定时启动、同时停止的时序图
图 3-10 为四台电动机顺序定时启动、同时停止的 PLC 梯形图。图中用到三个定时器,调用三 个 DB 块,如图 3-11 所示。
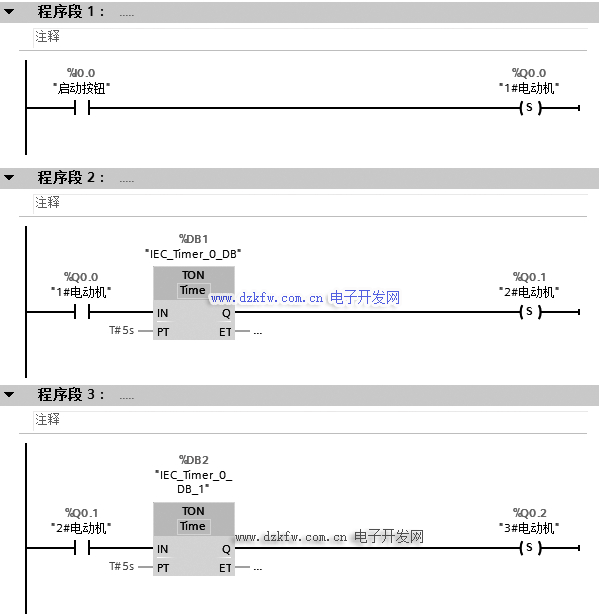
图 3-10 四台电动机顺序定时启动、同时停止的 PLC 梯形图
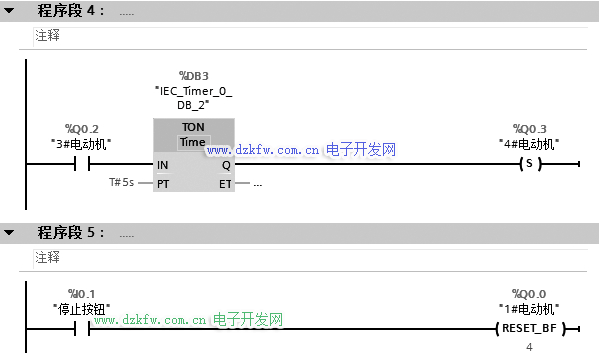
图 3-10 四台电动机顺序定时启动、同时停止的 PLC 梯形图(续)

图 3-11 调用三个 DB 块
当用户直接为定时器指定单一背景数据块时,该数据块仅包括一个 IEC_Timer 类型的变量。其优点
是易于用户区分多个定时器;缺点是当使用多个定时器时,会导致出现多个独立的数据块,程序结构显得零散。为解决这个问题,全局数据块定义一个IEC_Timer 类型的变量供定时器使用。其优点是不会因为使用多个定时器而造成增加多个数据块。
图 3-12 为添加新数据块(全局 DB )。添加的数据类型可以包括很多。三个定时器 IEC_TIMER 如图 3-13所示。表 3-4 为【实例 14 】增加的一个全局数据块 DB1 中的内容,并可以将原来的程序(程序段 2 )修改为如图3-14 所示的程序。
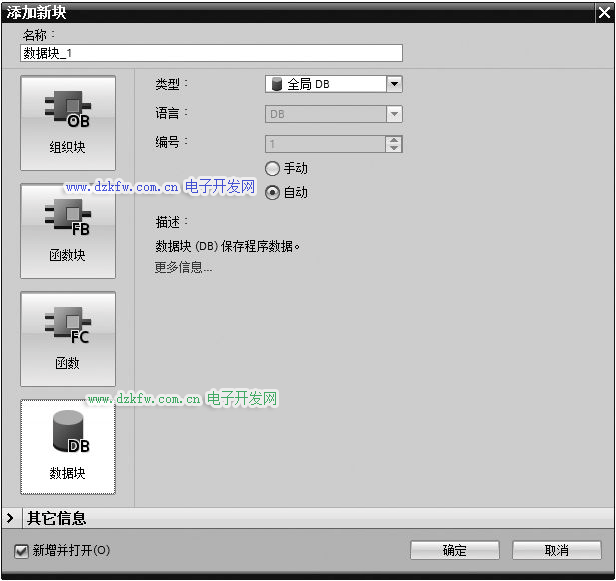
图 3-12 添加新数据块(全局 DB )
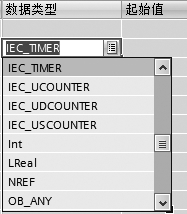
图 3-13 三个定时器 IEC_TIMER
表 3-4 【实例 14 】增加的一个全局数据块 DB1 中的内容

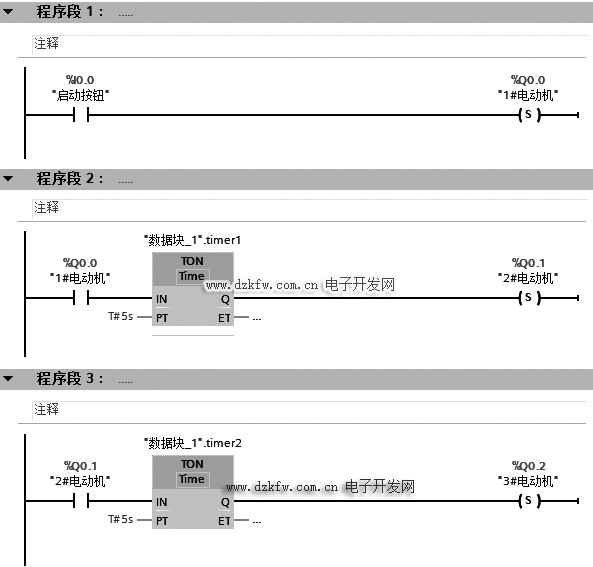
图 3-14 修改后的梯形图
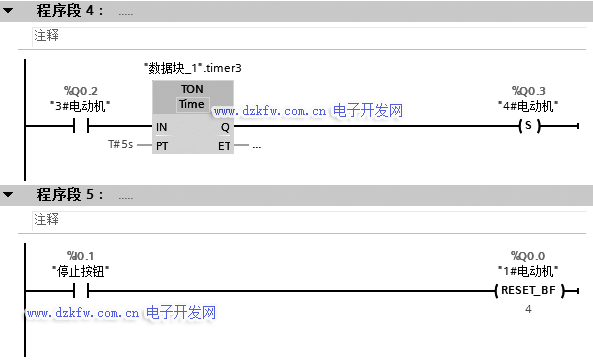
图 3-14 修改后的梯形图(续)
3.2.2 【实例 15 】四台电动机顺序定时启动,顺序定时停止
1.PLC 控制任务说明
用按钮控制四台电动机:按下启动按钮,先启动第一台电动机后,每隔 5s 启动一台电动机,直至第
四台电动机启动完毕;按下停止按钮,先停止第一台电动机后,每隔 5s 停止一台电动机,直至第四台电动机停止完毕。
2. 电气接线
四台电动机顺序定时启动、顺序定时停止的电气接线与【实例 14 】的电气接线相同。
3.PLC 编程
图 3-15 为四台电动机顺序定时启动、顺序定时停止的时序图,即按下启动按钮, Q0.0 先置位,第一台电动机启动,同时定时器1 开始计时, 5s 后, Q0.1 置位,第二台电动机启动,依次 5s 后,第三台电动机启动,第四台电动机启动;按下停止按钮后,第一台电动机先停机,5s 后,第二台电动机停机,依次5s 后,第三台、第四台电动机相继停机。
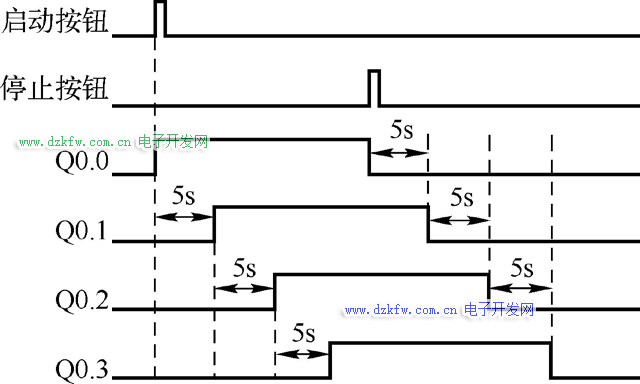
图 3-15 四台电动机顺序定时启动、顺序定时停止的时序图
四台电动机顺序定时启动、顺序定时停止的 PLC 梯形图如图 3-16 所示,与【实例 14 】相比,程序 段1 ~程序段 4 相同,区别在于停止方式,即在全局 DB 块中定义三个顺序定时启动定时器和三个顺序停 止定时定时器,分别为“ 数据块 _1”.timer1 到 “ 数据块 _1”.timer6 。程序段 5 ~程序段 8 为顺序停止过程。
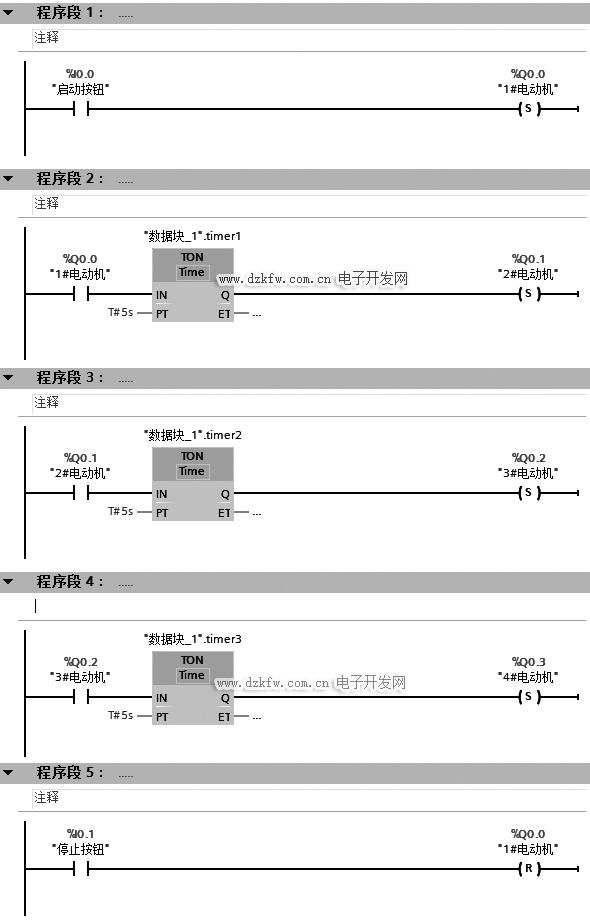
图 3-16 四台电动机顺序定时启动、顺序定时停止的 PLC 梯形图
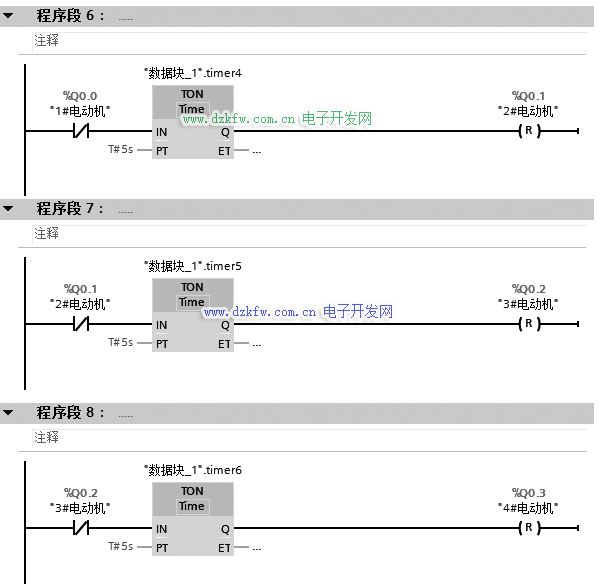
图 3-16 四台电动机顺序定时启动、顺序定时停止的 PLC 梯形图(续)
 返回顶部
返回顶部 刷新页面
刷新页面 下到页底
下到页底